Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Descrição
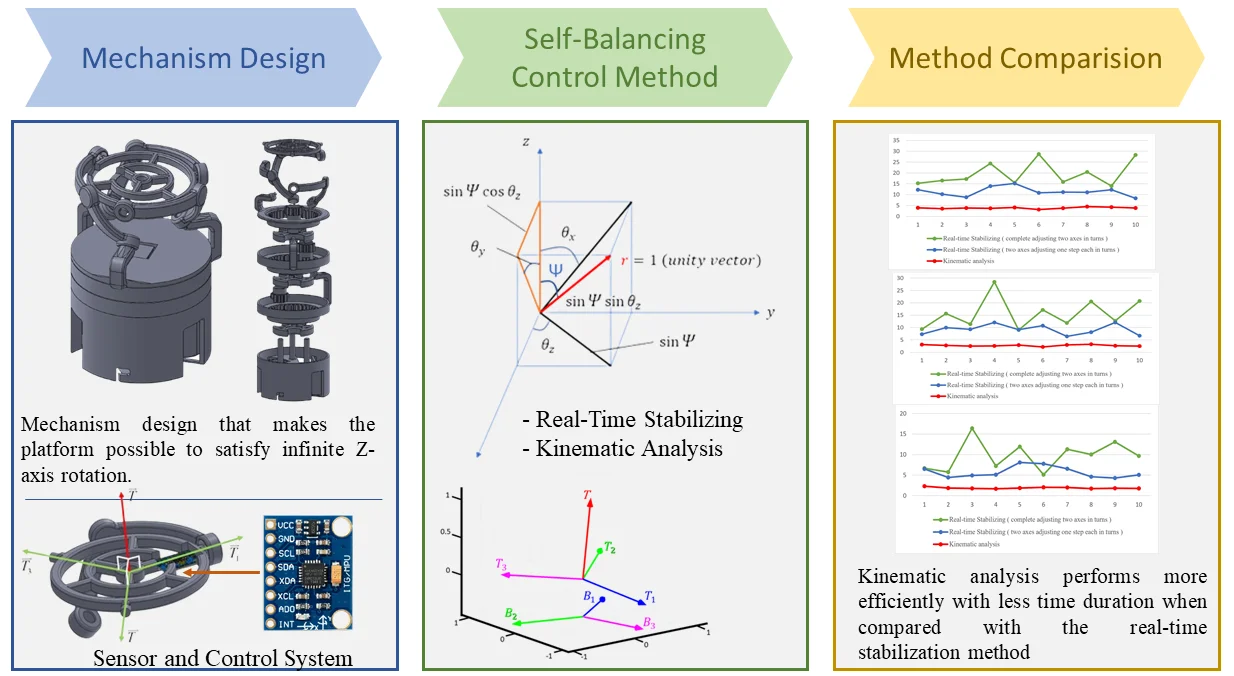
Designing and controlling a self-balancing platform mechanism based on 3-RCC spherical parallel manipulator - Extrica
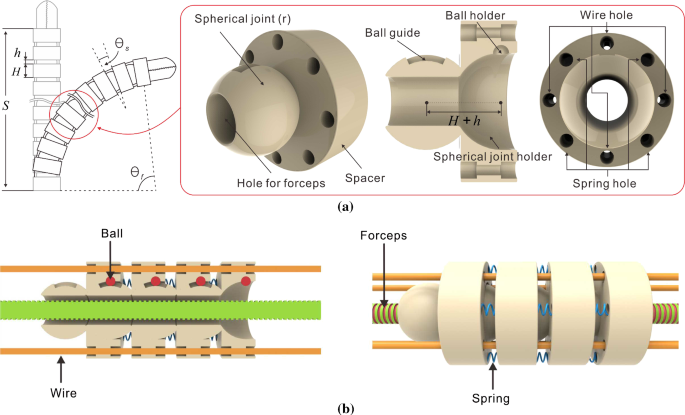
Wire-driven flexible manipulator with constrained spherical joints for minimally invasive surgery
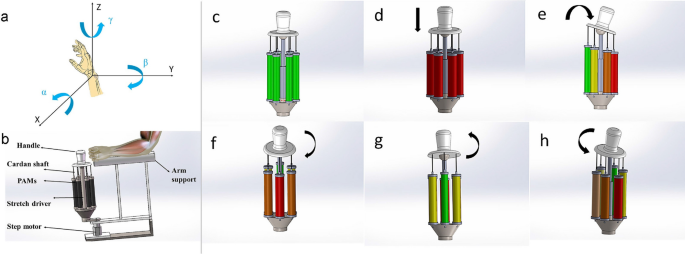
Design and testing of a soft parallel robot based on pneumatic artificial muscles for wrist rehabilitation
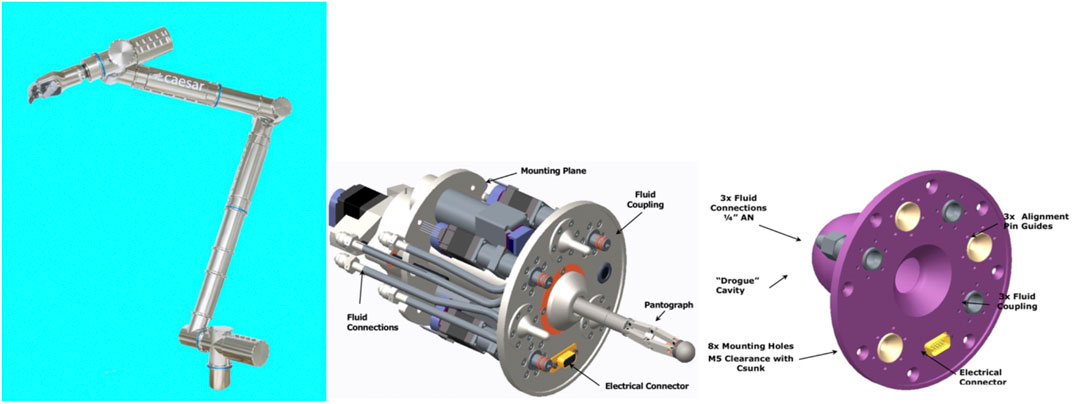
Frontiers Robotic Manipulation and Capture in Space: A Survey

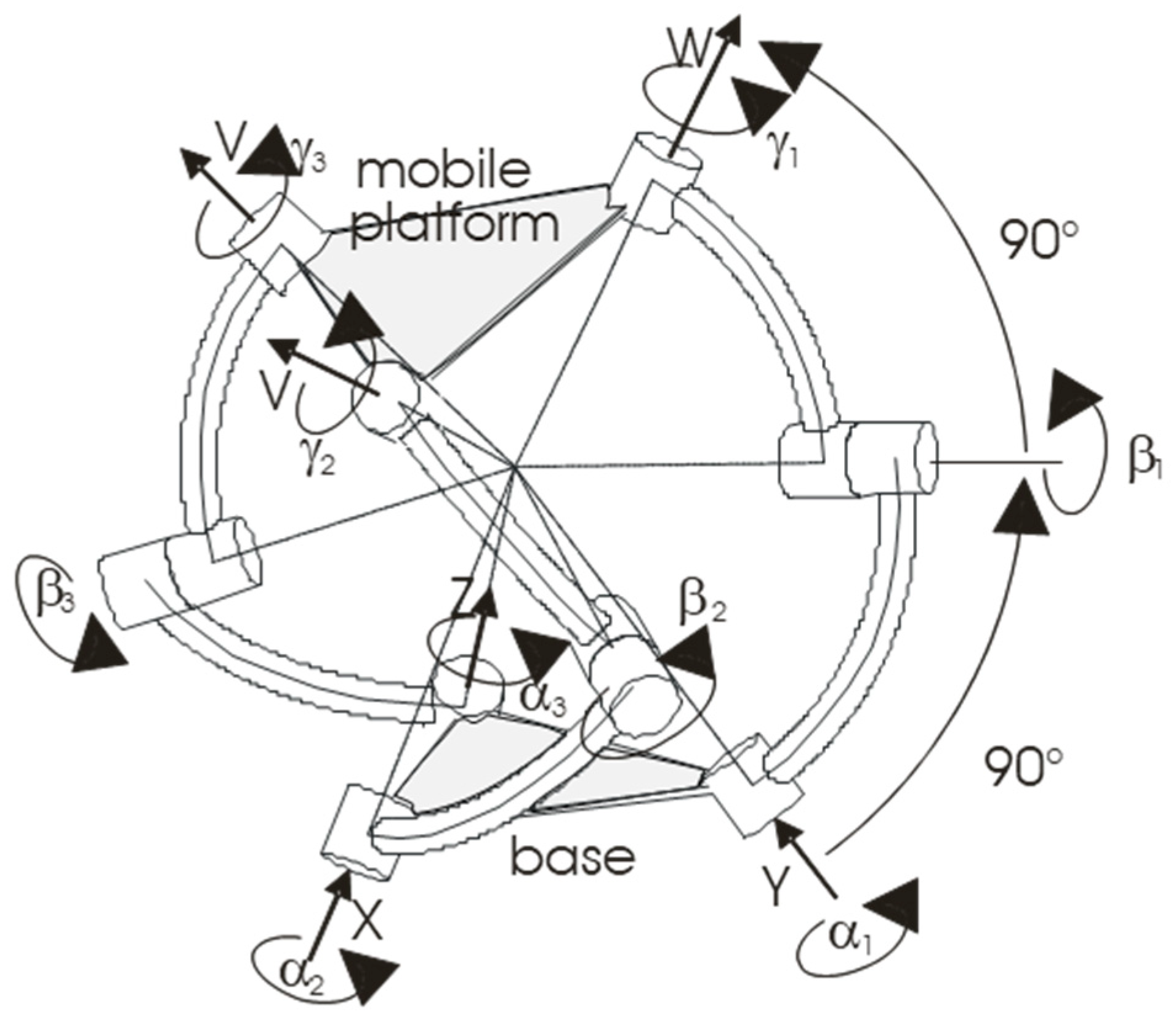
Kinematic model of a spherical parallel manipulator: (a) general model;

Analysis and control for a new reconfigurable parallel mechanism - Guanyu Huang, Dan Zhang, Hongyan Tang, Lingyu Kong, Sumian Song, 2020

Chapter 2
Robotics, Free Full-Text

A spherical parallel manipulator for the shoulder joint: aa a CAD

CIMAR

A 3-RRR Spherical Parallel Manipulator Reconfigured with Four-bar Linkages
New compact and dexterous robotic finger that
de
por adulto (o preço varia de acordo com o tamanho do grupo)